Shuai Wang
Shuai Wang
Home
Publications
Projects
Competitions
Awards
Patents
Skills
Contact
Light
Dark
Automatic
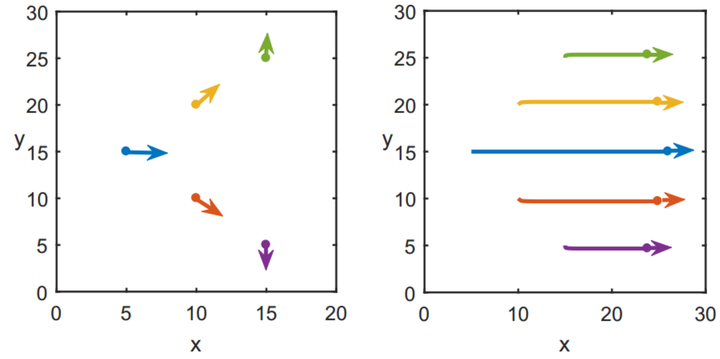
A Novel Variable-Gain Rectilinear or Circular Formation Algorithm for Unicycle Type Vehicles
Shuai Wang
,
Jiahu Qin
,
Qingchen Liu and Yu Kang
August 2018
PDF
Type
Conference paper
Publication
International Conference on Intelligent Robotics and Applications
Related
FlowDriveNet: An End-to-End Network for Learning Driving Policies from Image Optical Flow and LiDAR Point Flow
Spatio-Temporal Ultrasonic Dataset: Learning Driving from Spatial and Temporal Ultrasonic Cues
Circular Formation Algorithms for Multiple Nonholonomic Mobile Robots: An Optimization-Based Approach
Automated Visual Surveillance Using Multiple Cooperative Mobile Robots
A Tightly Coupled Feature-based Visual-Inertial Odometry with Stereo Cameras
Cite
×