Introduction
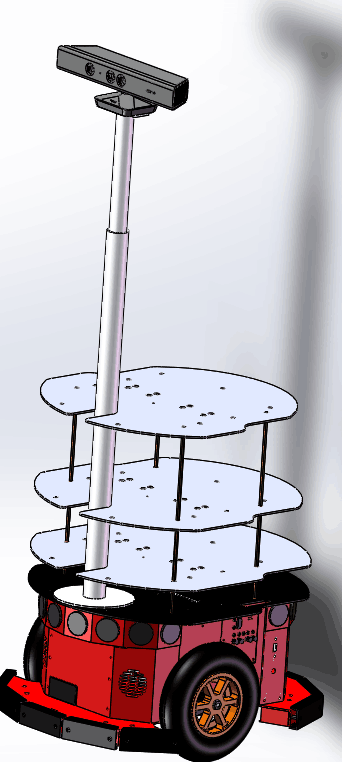
In this project, we build a human following robot based on a Pioneer-3DX mobile robot equipped with a Kinect sensor.
Platform

Methods
We use OpenNI and Skeleton Tracking to tracking person. The ROS openni_tracker package can use the depth data from a Kinect to track the joint positions of a person standing in front of the camera. Using this data, one can program a robot to follow gesture commands signaled by the user.
Experiments
