一种用于机器人的时空超声波导航数据采集方法及系统
1. 背景技术
当前各类不需要人工遥控、能够自主运行的移动机器人,如餐厅送餐机器人、快递物流机器人、家庭扫地机器人、宾馆引导机器人、医院消毒机器人等,都需要自主导航技术来实现机器人的自主运动。随着以深度学习为代表的人工智能技术的发展,人工智能技术也逐步应用到了机器人自主导航中技术中的各个子问题中。当前亟需一种可以用于室内环境下自主导航驾驶策略学习数据集,用于研究基于学习的移动机器人自主导航策略。
2. 发明内容
2.1 要解决的技术问题
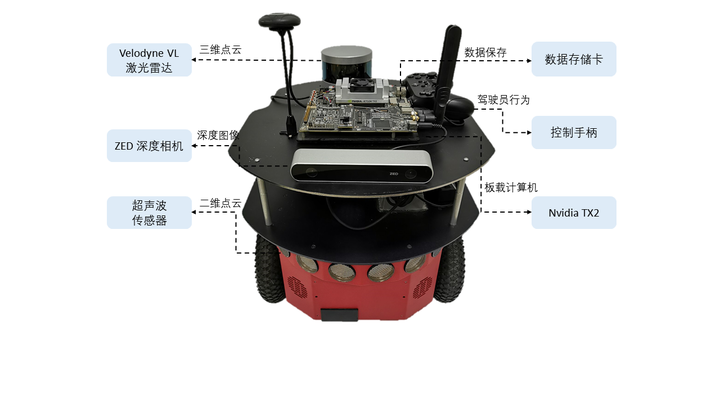
针对上述问题,本发明提供了一种用于机器人的时空超声波导航数据采集方法及系统,用于至少部分解决传统机器人导航系统中传感器昂贵等技术问题。
2.2 技术方案




